Following on from my previous post, so what if I now want to make a nice client side, but web-based application for playing videos. We can avoid using HTML for this purpose because we don’t need any search engine indexing, this means we get to use HTML5 canvas’s and a UI framework to speed up development.
Zebkit happens to be my favourite Javascript Canvas UI framework, it’s pretty quick to develop with and has most of the features of a standard desktop UI framework. What I found though is the video streaming is a bit lackluster, sure the support is technically in there but it made me long for the wonderful on-screen controls of the HTML5 video tag.
Recently I’ve wanted to look into how video streaming of local content can be done with NodeJS and HTML5’s video tag. I’ve only found one example to base upon, here. This demo though didn’t really cut it for me, for one it grabbed the file and split it in the client Javascript and then appended it to the video. Ideally, this would be done server side. It also has another bug where the split file doesn’t append at a time offset, and overwrites the original buffer.
I’ve created a demo that addresses these issues by creating a server in NodeJS that scans a videos directory and transcodes and splits the videos on the fly with ffmpeg. And uses mse_webm_remuxer to fix the format of these files in some magical way to make them compatible with HTML5’s MediaSource.
I’ve finally finished my dissertation and done my final presentation. I’ve previously detailed what the dissertation involved here. And this post is just going to be some additional documentation, and my dissertation.
I’ve created several Github repositories making all work public. The source code is split into three sections: the code for the radio board, the code for the sensor board and the configuration program. All can be found under source/code in the main Github repository:
Since January I’ve been working on my dissertation for university. It’s a small research and development project which aims to create some low-power sensor and gateway nodes which run from solar and interface them with a building management system called EMonCMS. This is for the company called CAT (Centre for Alternative Technology Wales).
In addition to those requirements the overall goal of the project is then to create an example implementation of an end node which monitors the level of a lake which provides water and hydroelectricity for the site.
The system I’m building has been split into two parts to share between two dissertations. My half focuses on creating the hardware and low power segment. Jonty Newman’s (http://www.jontynewman.com/) focuses on creating a gateway which bridges the low power segment to Ethernet using a Raspberry Pi translating messages from the low-power radio format to one accepted by EMonCMS. This includes buffering requests for sensor data and coordinating when nodes will go into sleep mode to conserve power.
For me January was mainly focused on researching the hardware and libraries to use to get the best value for money in terms of hardware costs and library usability. The radio segment is based upon work by TMRh20 (http://tmrh20.blogspot.co.uk/) who created a mesh networking layer for the nRF24l01+ radios. This library runs on both the Pi and Arduino platforms. The meshing capabilites are a little limited as it isn’t a true mesh, it’s tree based. This means it has to have a gateway node and that routing between leaf nodes is little less optimised. However, for this system of relaying all data to the gateway it’s a good fit.
On top of of this layer me and Jonty have created a specification for transferring various data types and making requests including encryption. This can be found here on Google Drive.
To conserve power the nodes and routers will all contain a real-time clock, this will be the cheap DS1302. This is so the whole network can have synchronized sleep.
For monitoring the lake level I’m using the PTM/N/RS485 pressure sensor by Omni Instruments. This sensor communicates using Modbus over RS485 and the public documentation is a complete pain and required a few weeks of emailing to get everything from them. Overall though they have good customer service. These pressure sensors are in titanium cases and can accurately measure down to a few hundred meters.
The sensor node which connects to the pressure sensor and relays data back over an nRF24l01-LNA-PA
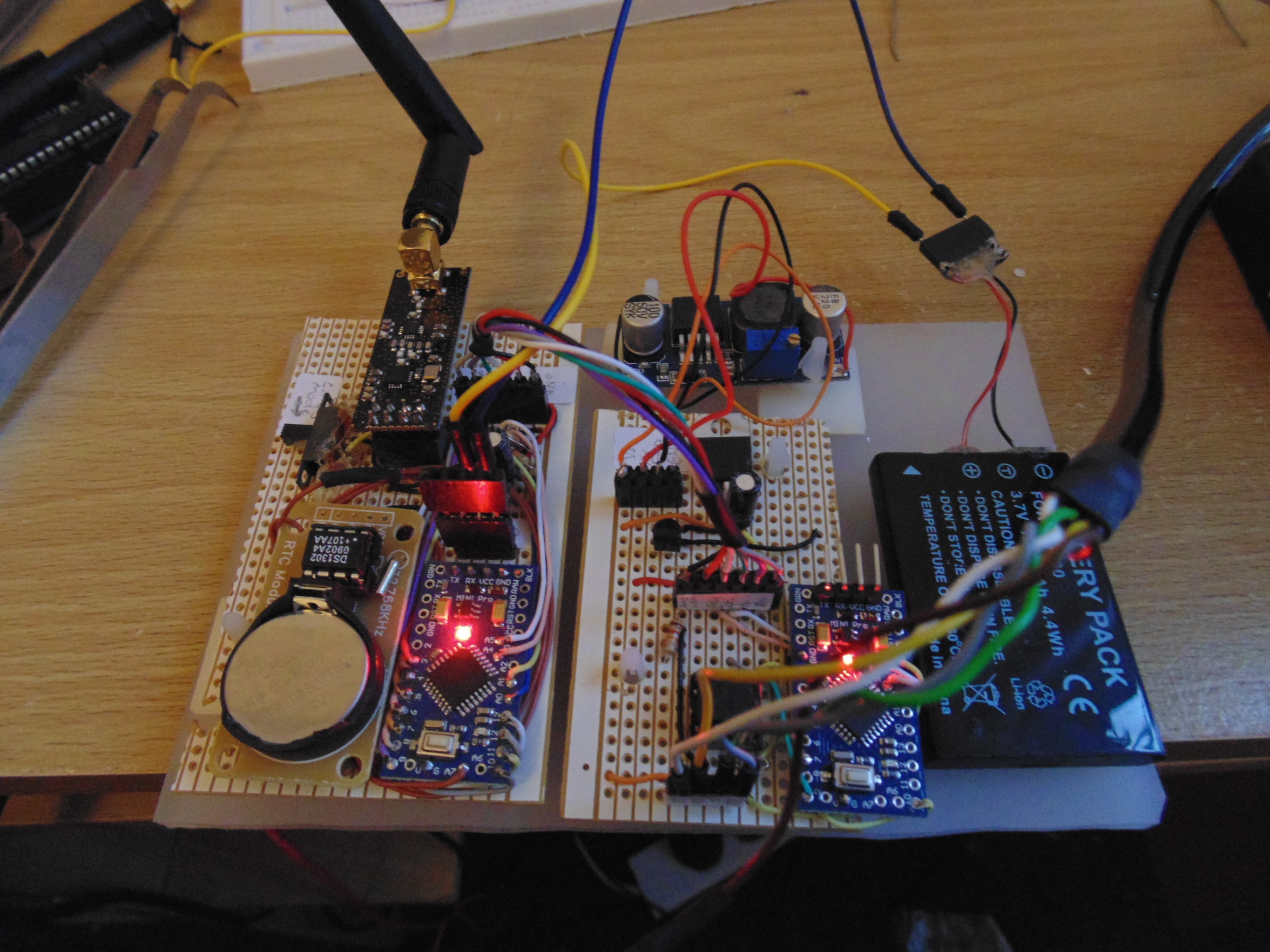
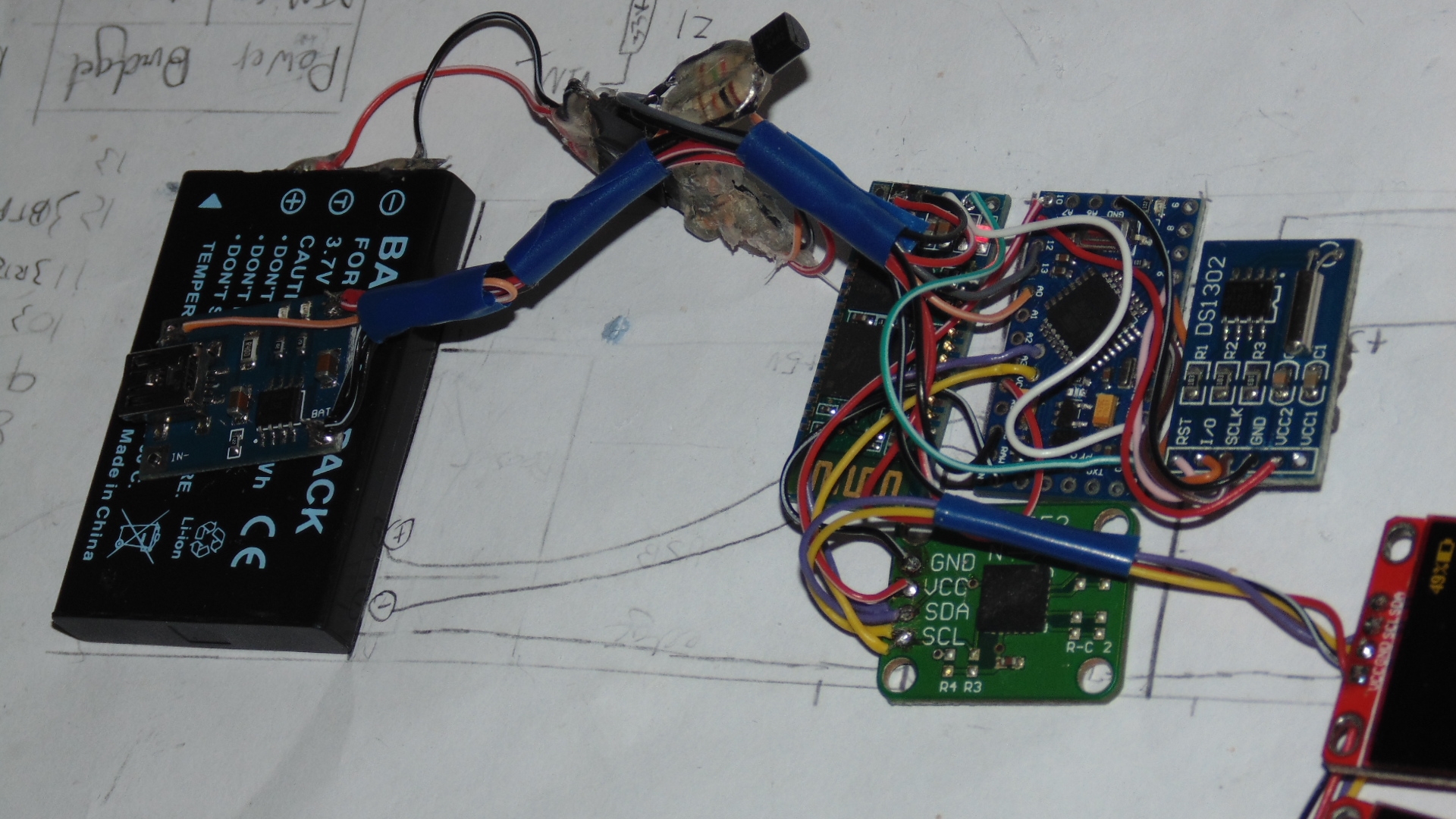
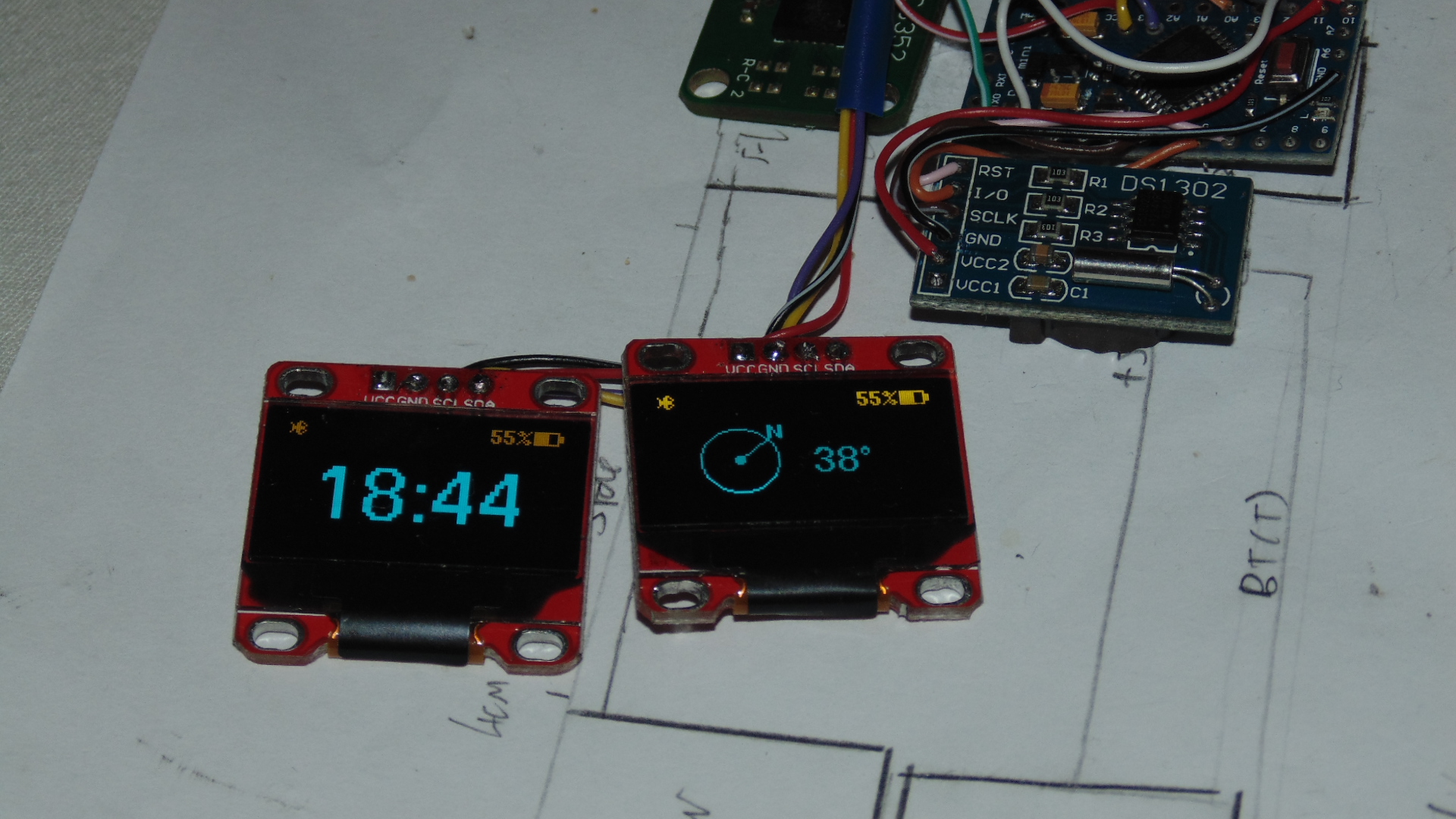
I’ve done a little more to my Arduino smart watch. Some software improvements but mostly soldering, cable tidying and adding the second screen. Following are pictures of my tidier cables (certainly not tidy though) and a picture of both screens running.